Automatický radiový kompas

Automatický radiový kompas (ARK) je námořní nebo letadlový radionavigační přístroj, který automaticky a nepřetržitě zobrazuje relativní směr z lodi nebo letadla k vhodné rádiové stanici.[3][4] Přijímače ARK jsou běžně naladěny na letecké nebo námořní NDB (nesměrové majáky) pracující v pásmu DV mezi 190 – 535 kHz. Podobně jako radiový zaměřovač může většina přijímačů ARK také přijímat vysílací stanice středních vln (AM), i když, jsou pro navigační účely méně spolehlivé.
Operátor naladí přijímač ARK na správnou frekvenci a ověří identitu majáku poslechem signálu Morseovy abecedy naladěného NDB. U námořních přijímačů ARK se samohybná feritová anténa na střeše plavidla (nebo namontovaná na stožáru) otočí a zajistí v nastavené orientaci, když dosáhne minimálního signálu naladěného vysílače. Stejně jako ukazatel pohybující se na růžici kompasu, kde indikuje směr stanice ve stupních. U leteckých ARK jednotka automaticky pohybuje ukazatelem radiomagnetického indikátoru (RMI), aby ukazoval směr k majáku. Pilot může použít tento ukazatel k návratu přímo k majáku, nebo může také použít magnetický kompas a vypočítat směr od majáku (radiálu), na které se letadlo nachází.
Princip funkce
Na rozdíl od radiového zaměřovače pracuje ARK bez nutnosti obsluhy a nepřetržitě zobrazuje směr naladěného majáku. Zpočátku všechny přijímače ARK, námořní i letecké verze, obsahovaly otočnou smyčku nebo feritovou smyčkovou anténu poháněnou motorem, který byl řízen přijímačem. Podobně jako u radiového zaměřovače, přijímací anténa pak verifikovala zaměřený směr svým symetrickým 180stupňovým otočením.
Modernější ARK pro letectví obsahují malé ortogonální pevné rámové antény a elektromechanický senzor (goniometr) k odvození směru pomocí amplitudy a fáze signálů z každé antény. Elektromagnetický goniometr sleduje přenos, ke kterému dochází, když je anténa v pravém úhlu k signálu, a poskytuje informaci o směru ke stanici pomocí směrového indikátoru. Během letu bude RMI nebo ukazatel směru ARK vždy ukazovat na vysílací stanici bez ohledu na kurz letadla.


Přesněji se pro určení směrníku NDB majáku využívá všesměrové referenční antény, která umožňuje porovnání fáze i amplitudy vůči směrové rámové anténě. Použitím referenční antény je tak umožněno jednodušší a přesnější zpracování signálu analogovými obvody podle blokového schéma znázorněného na obrázku. Další obrázek pak znázorňuje signál v jednotlivých částech blokového schéma.
Navigační chyby
Chyba sklonu
Když je ale letadlo v nakloněné poloze, objeví se sklonová chyba určení směru, protože ručička indikátoru se nedotáčí do směru zatáčky. Příčinou je, že rámové antény se naklání společně s letadlem, a proto jsou během zatáčky v jiném úhlu vzhledem k majáku. Pro snazší pochopení si můžeme představit zatáčku s náklonem o 90° to znamená vertikálními křídly. Orientace majáku při pohledu z antény ARK nyní nebude souviset se směrem letu letadla vůči majáku.
Kvadrantová chyba
Chyba sklonu je někdy nesprávně zaměňována s kvadrantovou chybou, která je výsledkem odrazu a opětovného vyzařování rádiových vln drakem letadla. Kvadrantní chyba neovlivňuje signály z přímého směru nebo zezadu, ani ze směrů křídel. Čím dále od těchto významných směrů a čím blíže ke kvadrantálním bodům (tj. 45°, 135°, 225° a 315° od nosu), tím větší je její účinek, ale kvadrantní chyba je obvykle mnohem menší než chyba sklonu, která je vždy přítomna když je letadlo nakloněno.

Břehový lom

Rádiové vlny se nad vodou zrychlují díky změně indexu lomu (Fermatův princip). To způsobí, že signál mírně změní směr. S původním signálem tak svírá nenulový úhel. Tuto chybu nelze odstranit, je způsobena nehomogenitou rozhraní moře/pevnina.
Typické dosahy nesměrových majáků (NDB)
Nesměrové majáky jsou klasifikovány podle výstupního výkonu: „nízký“ jmenovitý výkon je menší než 50 wattů; "střední" od 50 W do 2 000 W; a "vysoký" při více než 2 000 W. [5] Dosah majáku je definován jako oblast, kde E > 70mV/m.
| Třída NDB, podle výkonu | Vysílací výkon, watty (W) | Efektivní dosah v námořních mílích ( nmi ) |
|---|---|---|
| Lokalizační maják | 0–25 | 15 |
| Nízký | 0–50 | 25 |
| Střední | 50–2 000 | 50 |
| Vysoký | 2000+ | 75 |
Možnosti použití
ARK umožňuje sledovat a zobrazit několik různých veličin podle způsobu užití navigátorem. Přijímače ARK lze použít k určení aktuální polohy, sledování příletové a odchozí dráhy letu a zachycení požadovaného azimutu. Tyto procedury se používají k provádění vyčkávacích vzorů a nepřesných přístrojových přiblížení.

Míjení stanice (Station passage)
Jak se letadlo přibližuje k majáku NDB, ARK se stává stále citlivější, malé boční odchylky mají za následek velké vychýlení ručičky, která následně vykazuje nevyzpytatelné oscilace vlevo/vpravo.[6]V ideálním případě, když letadlo přeletí maják, ručička se rychle protočí z přímého směru přímo zpět. Taková situace indikuje přelet stanice a poskytuje navigátorovi informaci o přesné poloze. Méně přesný přelet nad vysílačem, se stranovou odchylkou, se projevuje zpomaleným (ale stále rychlým) protočením ručičky. Časový interval od prvních náznaků blízkosti stanice po průlet nad vysílačem se mění s nadmořskou výškou – od několika sekund v nízkých hladinách až po několik minut ve vysoké nadmořské výšce.
Přímé navádění (Homing)
ARK lze použít k přímému navádění (Homing) na vysílač. Homing je let letadlem v kurzu požadovaném k udržení ručičky ukazatele na poloze 0° (přímo vpřed). K přímému letu k vysílači, nalaďte požadovaný vysílač, ověřte signál poslechem morseova kódu a následně nasměrujte letadlo tak, aby ručička azimutu ARK ukazovala polohu 0°. Zatáčejte tak, aby indikátor ARK směřoval přímo dopředu. Jednoduchý homing je považován za špatnou techniku pilotáže, protože letadlo může být bočním větrem výrazně nebo nebezpečně vychýleno z dráhy a bude muset letět déle a delší trasu (označovanou jako Ψ-křivka) než je přímka ve směru k vysílači.

Sledování (Tracking)
ARK může být také použito ke sledování požadovaného kurzu a umožňuje eliminaci snosu větrem. Tato technika pilotáže umožňuje pilotovi vypočítat korekční úhel, který přesně vyrovnává očekávaný boční vítr. Jak let postupuje, pilot sleduje směr k nebo od NDB pomocí ARK a podle potřeby provádí korekci letu tak, aby udržel letadlo na trati zadané směrníkem majáku. Taková letová trať umožňuje letět nejkratší vzdálenost a čas do umístění vysílače.

Radiomagnetický indikátor (RMI)

Radiomagnetický indikátor ( RMI ) je alternativní displej ADF, který poskytuje více informací než standardní ARK. Zatímco ARK ukazuje relativní úhel vysílače vzhledem k letadlu, displej RMI obsahuje kompasovou kartu, ovládanou kompasovým systémem letadla a umožňuje operátorovi číst magnetický směr k nebo od vysílací stanice, aniž by potřeboval provádět aritmetické výpočty.
Většina RMI obsahuje dvousměrné ručičky. Často je jedna ručička (širší s dvojitým pruhem) propojena s ARK a druhá (obecně tenká nebo jednoduchá ručička) je propojena s indikátorem VOR . Pomocí kombinace indikátorů může navigátor přesně určit polohu svého letadla s využitím triangulace, aniž by musel letadlem přeletět přes vysílač. Některé modely umožňují operátorovi vybrat, která ručička je připojena ke kterému navigačnímu přijímači. Mezi různými modely jsou velké rozdíly a operátor musí dbát na to, aby jejich výběr zobrazoval informace z příslušného ARK a VOR.
Takový typ přístrojového indikátoru může nahradit ukazatel magnetického kompasu na přístrojové desce, ale ne nutně gyroskopický ukazatel směru. Indikátor směru lze podobným způsobem zkombinovat s informacemi z navigačních rádií (především VOR/ILS) a vytvořit tak indikátor horizontální situace (HSI). HSI spolu se systémem VOR do značné míry nahradily použití RMI, nicméně mnohem vyšší cena HSI udržuje starší kombinaci RMI a VOR stále atraktivní pro piloty.
Odkazy
Reference
V tomto článku byl použit překlad textu z článku Automatic direction finder na anglické Wikipedii.
- ↑ airplanesandrockets.com. Dostupné online.
- ↑ blog.seattlepi.com. Dostupné online.
- ↑ ; Federal Aviation Administration. [s.l.]: [s.n.] Dostupné online. ISBN 978-1-56027-783-5.
- ↑ ; Civil Aviation Safety Authority. Archivovaná kopie [online]. [cit. 2022-05-09]. Dostupné v archivu pořízeném dne 2009-05-30.
- ↑ Navigation Systems - Level 3 [online]. allstar.fiu [cit. 2022-05-09]. Dostupné v archivu pořízeném dne 2010-12-28.
- ↑ TAIT, Bob. CPL navigation : for the Commercial Pilot Licence CASA Pilot Examination Office (PEXO) Examinations. Revised 2018 [edition]. vyd. Redcliffe, Qld.: [s.n.] 199 s. ISBN 978-1-64136-591-8, ISBN 1-64136-591-9. OCLC 1101059529
{kind=link}
Související články
Externí odkazy
 Obrázky, zvuky či videa k tématu Automatický radiový kompas na Wikimedia Commons
Obrázky, zvuky či videa k tématu Automatický radiový kompas na Wikimedia Commons
Média použitá na této stránce
Autor: Ward b1, Licence: CC BY-SA 4.0
schets van het "breken" van een radiosignaal over water
Autor: Kaklik, Licence: CC BY-SA 4.0
Zobrazení signálů z jednotlivých fází určení směru majáku. Průběhy odpovídají stejnobarevně označeným místům v blokovém diagramu.
Autor: Kaklik, Licence: CC BY-SA 4.0
Navigační veličiny poskytované ARK. Směrník majáku je označen zeleně. Jak kurs, tak i směrník majáku mohou být vztaženy k magnetickému, zeměpisnému, nebo kompasovému severu.
Autor: Kaklik, Licence: CC BY-SA 4.0
Letecký Goniometr ARK. (A) - Kompletní goniometr, (B) - Stator, (C) - Rotor, (D) - Sběrné kartáče. Výukový vzorek ČVUT FEL, Praha.
Autor: Z22, Licence: CC BY-SA 4.0
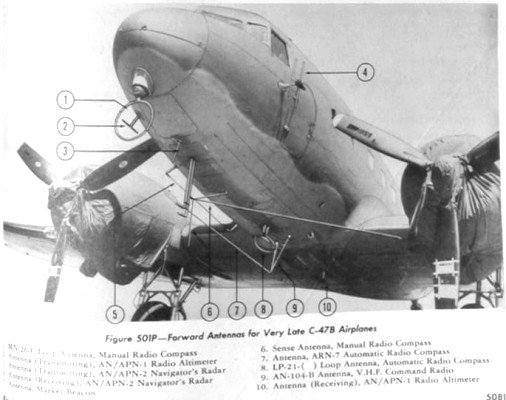
LP-21 loop antenna attached to the underside of Douglas DC-3 "Flagship Knoxville" used for automatic radio compass. The rotatable loop antenna is encased in a teardrop-shaped housing.
Autor: Kaklik, Licence: CC BY-SA 4.0
Blokové schéma atomatického radiového kompasu. Zobrazuje analogové zpracování signálu z obou antén (směrové rámové a všesměrové referenční antény). Barevně jsou označeny signály v jednotlivých částech blokového schéma.
Autor: Kaklik, Licence: CC BY-SA 4.0
Využití ARK k eliminaci snosu bočním větrem.
Autor: Kaklik, Licence: CC BY-SA 4.0
Zakřivení trajektorie letu způsobené snosem větru.