Mechanika tuhého tělesa
Mechanika tuhého tělesa (mechanika dokonale tuhého tělesa, popř. také stereomechanika) je část mechaniky, která se zabývá pohybem tuhého tělesa a silami na ně působícími. Skutečná pevná tělesa jsou soubory atomů a molekul vázaných jistými vnitřními silami, které je možné vnější silou překonat a těleso deformovat.
Popis reálných těles s uvážením deformací je poměrně složitý, proto byl zaveden pojem tuhého tělesa, což je ideální těleso, které svůj tvar ani objem působením libovolně velkých sil nemění. Tuhé těleso je vymezeno svou hmotností a geometrickým tvarem, kterému přísluší objem .
Tuhé těleso, jakožto soustavu atomů nebo molekul, lze nahradit soustavou hmotných bodů, jejichž vzájemné vzdálenosti se nemění.
Poloha a pohyb
Poloha dokonale tuhého tělesa v prostoru je plně určena polohou jeho tří bodů, které neleží v jedné přímce. Souřadnice těchto tří bodů však nelze volit zcela libovolně, poněvadž jejich vzájemné vzdálenosti jsou určeny tvarem tělesa. Z devíti souřadnic tří bodů tělesa lze volit pouze šest, neboť zbývající tři souřadnice již vyplynou z pevně určených vzdáleností vrcholů trojúhelníka tvořeného danými body. Poloha tuhého tělesa je tak určena šesti souřadnicemi, které lze považovat za šest nezávislých parametrů. Tuhému tělesu je tedy přisuzováno šest stupňů volnosti. Takový počet stupňů volnosti má však pouze tuhé těleso, jehož poloha není omezována žádnými dalšími podmínkami (tedy volné těleso).
Zavádí se pojem Hmotný střed, jako
Volba těchto parametrů je závislá na daných podmínkách řešeného problému. Vhodnou volbou mohou být např. tři souřadnice těžiště a tři úhly určující orientaci tělesa vzhledem k osám soustavy souřadnic. Těmito třemi úhly mohou být např. Eulerovy úhly.
Pohyb tuhého tělesa lze vždy rozložit na (Chaslesova věta):
Všechny body tělesa se pohybují po rovnoběžných trajektoriích

všechny body tělesa se pohybují po kružnicích se středy na ose otáčení.
Výsledný obecný pohyb tuhého tělesa je složením obou pohybů.
Speciálním druhem posuvného pohybu je pohyb paralelní (kruhový, spirálový, cykloidní).

K posouzení účinku síly na otáčivý pohyb se zavádí veličina moment síly a k posouzení množství energie nutné k roztočení tělesa na určitou úhlovou rychlost veličina moment setrvačnosti.
Síly
Působiště síly v tuhém tělese lze posouvat po vektorové přímce síly. Tohoto a dalších poznatků se využívá k hledání výslednice sil, ke skládání sil. Dvě stejně velké síly opačného směru, které neleží na společné přímce, však nelze skládat a tvoří tzv. dvojici sil. Stejně tak nelze skládat dvě mimoběžné síly.
Rovnováha sil
V gravitačním poli Země působí na hmotné body tuhého tělesa síly, které jsou prakticky rovnoběžné a přímo úměrné hmotnosti jednotlivých hmotných bodů. Výslednicí těchto sil je celková tíha tělesa , která leží na přímce zvané těžnice. Pokud těleso pootočíme, těžnice v něm změní polohu. V praxi lze těžnici snadno určit zavěšením tělesa. Průsečík všech těžnic se nazývá těžiště nebo též hmotný střed tělesa.
Je-li výslednice všech sil i výslednice všech momentů sil nulová, je těleso v rovnovážné poloze (viz rovnováha sil). Z hlediska reakce tělesa v rovnovážné poloze na vychýlení rozlišujeme tři druhy rovnovážné polohy:
Stabilita tělesa je jeho schopnost udržovat stálou rovnovážnou polohu, množství práce, kterou je potřeba vynaložit k jeho uvedení do vratké rovnovážné polohy.
Staticky a dynamicky vyvážené těleso
Těleso které se může otáčet kolem osy procházející těžištěm se nachází v indiferentní poloze, neboť rovnováha tělesa zůstává zachována při libovolném pootočení tělesa. Říkáme, že těleso je staticky vyvážené.
Pokud takové těleso kolem osy rotuje, může v důsledku odstředivých sil docházet ke vzniku dodatečných sil, které se snaží vychýlit osu rotace ze svého směru. Tento problém lze odstranit rozložením hmoty tělesa vzhledem k rotační ose tak, aby výslednice všech odstředivých sil a jejich momenty byly nulové. Takové těleso nazýváme dynamicky vyvážené.
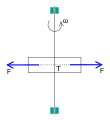
Dynamicky vyvážené těleso
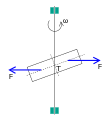
Dynamicky nevyvážené těleso
Související články
- Mechanika hmotného bodu
- Mechanika kontinua
- Mechanika pružného tělesa
- Soustava mnoha těles
Externí odkazy
 Obrázky, zvuky či videa k tématu mechanika tuhého tělesa na Wikimedia Commons
Obrázky, zvuky či videa k tématu mechanika tuhého tělesa na Wikimedia Commons
Média použitá na této stránce

Příklad dynamicky nevyváženého tělesa.
Autor: Jjvcela, Licence: CC BY-SA 3.0
posuvný_a_rotační_pohyb_tělesa.jpg

Příklad dynamicky vyváženého tělesa.